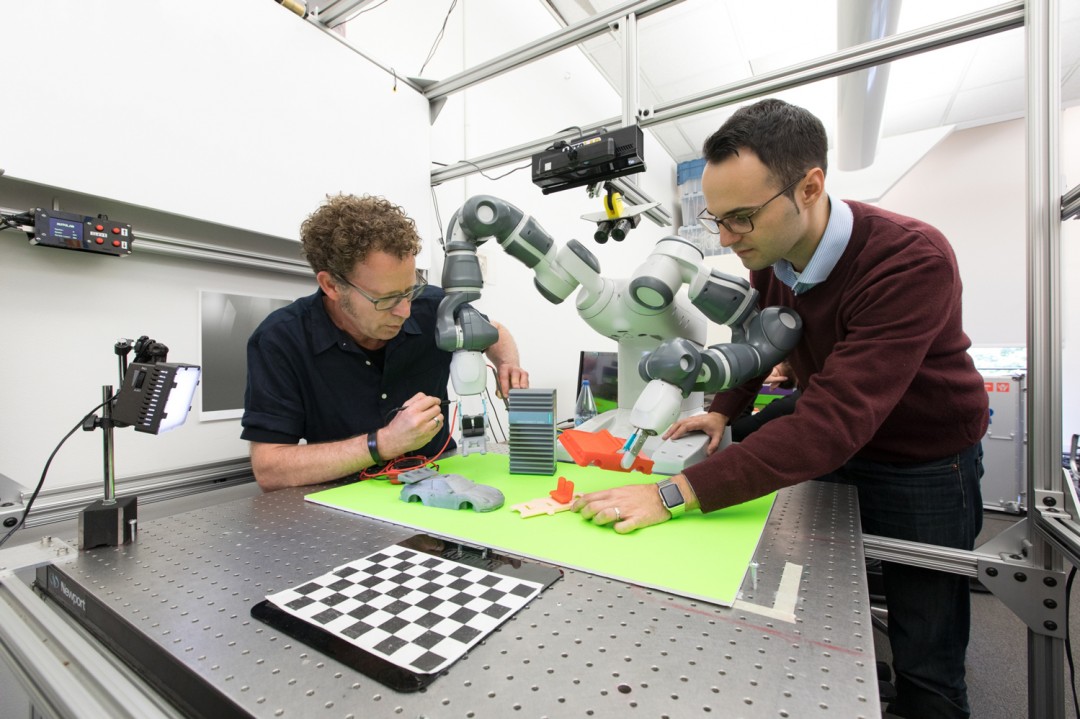
Инженеры университета Калифорнии (Беркли) создали робота DexNet 2.0, обладающего рекордной для «умных машин» ловкостью. Он способен захватывать предметы нестандартной формы.
Робот создан на базе серийной модели с парой манипуляторов и камерой глубины, генерирующей в реальном времени трёхмерную модель предмета перед ним.
 Чтобы научить выбирать способ захвата предмета, управляющей им нейросети глубокого обучения «скормили» 1,5 тысяч трёхмерных образов самых разных предметов.
Чтобы научить выбирать способ захвата предмета, управляющей им нейросети глубокого обучения «скормили» 1,5 тысяч трёхмерных образов самых разных предметов.
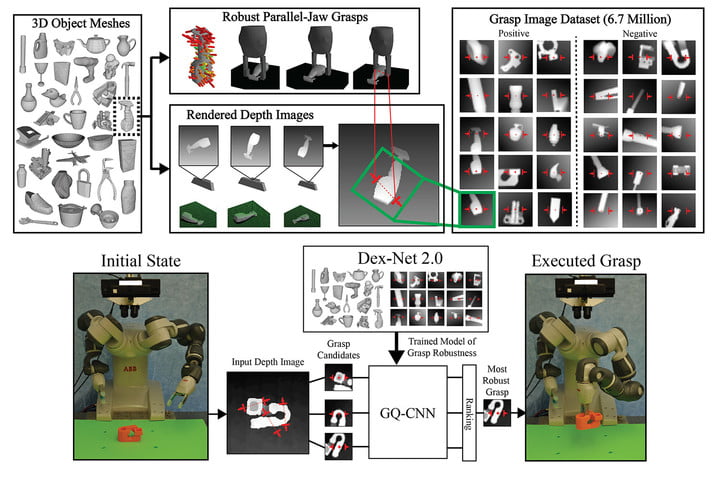 DexNet захватывает предмет, если нейросеть прогнозирует успех более чем на 50%. Если вероятность ниже, робот старается изменить положение предмета в пространстве и тогда заново проводит оценку. Успешными признавались попытки, в которых предмет был крепко захвачен роботом и перемещён или если удавалось хотя бы потрясти изделие и не уронить его.
DexNet захватывает предмет, если нейросеть прогнозирует успех более чем на 50%. Если вероятность ниже, робот старается изменить положение предмета в пространстве и тогда заново проводит оценку. Успешными признавались попытки, в которых предмет был крепко захвачен роботом и перемещён или если удавалось хотя бы потрясти изделие и не уронить его.
 В 93% случаев робот справлялся с предметами, которые были в его базе и с 80% незнакомых, тратя всего около 0,8 секунд на обдумывание варианта захвата. Так что вскоре ручная сортировка всевозможных предметов может сильно упроститься.
В 93% случаев робот справлялся с предметами, которые были в его базе и с 80% незнакомых, тратя всего около 0,8 секунд на обдумывание варианта захвата. Так что вскоре ручная сортировка всевозможных предметов может сильно упроститься.
